GPS
GPS GYSFDMAXB を mruby/c から利用する. GPS GYSFDMAXB はシリアル通信の 1 つである UART でマイコンと通信を行うものであり,ここでは mrubyc for ESP32 ライブラリ に含まれる UART 用クラスを利用するものとする.
注意: GPS の電波は屋内では受信しづらい.マイコンを窓側に置くこと.
UART
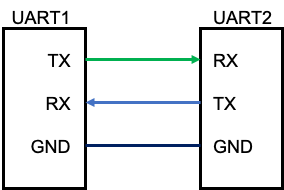
UART は非同期のシリアル通信である. 非同期のためにクロック用のラインは存在しない.
- 2 本の信号線で構成される (全二重通信)
- TX: データ出力
- RX: データ入力
- クロック同期式と比べて伝送速度は低速 (最大 20 kbps)
- UART にはクロック信号がないため, 通信をする前に送受信するデバイス間で通信速度 (ボーレート) を決める必要がある.
GPS の出力: NMEAフォーマット
GPSモジュールからは NMEA フォーマットの情報が送信される. NMEAフォーマットの情報はセンテンスの集まりであり,1 つのセンテンスは「$」で始まり, csv と同様にカンマ区切りでデータが並ぶ.
$GPGGA,030917.000,3529.8275,N,13301.5109,E,1,6,3.66,41.3,M,28.6,M,,*67 $GPGLL,3529.8275,N,13301.5109,E,030917.000,A,A*5D $GPGSA,A,3,19,01,14,28,17,21,,,,,,,3.77,3.66,0.93*0B $GPGSV,4,1,15,01,73,016,28,22,53,107,,14,51,310,34,21,50,041,24*71 $GPGSV,4,2,15,03,42,148,,28,35,316,29,08,30,084,,17,29,297,34*71 $GPGSV,4,3,15,30,26,246,,07,15,208,,19,06,284,27,27,01,096,*7A $GPGSV,4,4,15,193,,,,194,,,,195,,,*47 $GPRMC,030917.000,A,3529.8275,N,13301.5109,E,0.15,22.47,160621,,,A*5F $GPVTG,22.47,T,,M,0.15,N,0.29,K,A*01 $GPZDA,030917.000,16,06,2021,,*5A
各センテンスの意味は「NMEAフォーマット」で Google 検索すると多くの記事が引っかかるが, 例えば <URL:https://www.hiramine.com/physicalcomputing/general/gps_nmeaformat.html> などが読み易い.
RMC
GPS から日時・緯度経度を取得する場合には,センテンス $GPRMC に着目すれば良い.
センテンス例: $GPRMC,085120.307,A,3541.1493,N,13945.3994,E,000.0,240.3,181211,,,A*6A
- 第 1 引数: 世界標準時 (UTC) での時刻. フォーマットは hhmmss.ss
- 例: 085120.307 → 08:51:20.307 UTC
- 第 2 引数: ステータス
- V = 警告, A = 有効
- 第 3 引数: 緯度. フォーマットは dddmm.mmmm
- 例: 3541.1493 → 緯度:35度41.1493分
- 第 4 引数: 北緯か南緯か
- N = 北緯, S = 南緯
- 第 5 引数: 経度. フォーマットは dddmm.mmmm
- 例: 13945.3994 → 経度;139度45.3994分
- 第 6 引数: 東経か西経か
- E = 東経、W = 西経
- 第 7 引数: 地表面における移動の速度 000.0 -- 999.9 [knot].
- 第 8 引数: 地表における移動の真方位。000.0~359.9度
- 第 9 引数: 世界標準時 (UTC) での日付
- 例: 181211 → 2011年12月18日(UTC)
- 第 10 引数: 磁北と真北の間の角度の差。000.0~359.9度
- 第 11 引数: 磁北と真北の間の角度の差の方向。E = 東、W = 西
- 第 12 引数: モード
- N = データなし, A = Autonomous(自律方式), D = Differential(干渉測位方式), E = Estimated(推定)
- 第 13 引数: チェックサム値
プロジェクトの準備
$ cd ~/esp $ git clone https://github.com/gfd-dennou-club/iotex-esp32-mrubyc.git mrubyc-13-gps $ cd mrubyc-13-gps
なお,make menuconfig で I2C, LCD (I2C), UART にチェックを入れること
$ make menuconfig [*] USR ESP32 I2C [*] PERIPHERAL: LCD Display AQM0802A [*] USR ESP32 UART
プログラム例と実行 (1)
mrblib/loops/master.rb を以下のように編集して実行してみよ. この例では, GPS のデフォルトの出力を確認する.
1 # coding: utf-8
2
3 # GPS初期化 txPin = 17, rxPin = 16 のため uart_num = 2 とする
4 gps = UART.new(2, 9600)
5
6 # 出力をデフォルトに戻す
7 gps.write("$PMTK314,-1*04\r\n")
8
9 # 入力データをclear_tx_bufferで消去する
10 puts "> gps.clear_tx_buffer"
11 gps.clear_tx_buffer
12
13 # 入力データが来るのを待つ
14 sleep 2
15
16 # nonblock で到着している分のデータを取得する (デフォルトでは出力もされる)
17 lines = gps.read_nonblock(4096)
18
19 # 以下、到着したデータを 1 行ずつ読み込んで表示
20 while true
21 puts gps.gets()
22 sleep 1
23 end
コンパイルと実行. デフォルトでは大量のセンテンスが表示されることがわかる.
$ make flash monitor ...(前略)...... UART: driver was successfully installed > gps.clear_tx_buffer )?38 $GPZDA,032458.000,19,06,2021,,*51 $GPGGA,032459.000,3529.8110,N,13301.4898,E,1,6,4.45,40.2,M,28.6,M,,*64 $GPGLL,3529.8110,N,13301.4898,E,032459.000,A,A*58 $GPGSA,A,3,28,21,01,14,17,19,,,,,,,4.54,4.45,0.93*0B $GPGSV,4,1,15,14,62,296,28,01,60,029,14,22,54,084,,03,53,135,*78 $GPGSV,4,2,15,28,45,312,30,21,39,046,20,17,38,307,31,08,22,095,*75 $GPGSV,4,3,15,30,19,235,,19,14,293,21,07,05,201,,06,03,240,*71 $GPGSV,4,4,15,193,,,,194,,,,195,,,*47 $GPRMC,032459.000,A,3529.8110,N,13301.4898,E,0.18,217.89,190621,,,A*6E $GPVTG,217.89,T,,M,0.18,N,0.33,K,A*31 $GPZDA,032459.000,19,06,2021,,*50 $GPGGA,032500.000,3529.8107,N,13301.4903,E,1,6,4.45,40.3,M,28.6,M,,*6D $GPGLL,3529.8107,N,13301.4903,E,032500.000,A,A*50 $GPGSA,A,3,28,21,01,14,17,19,,,,,,,4.54,4.45,0.93*0B $GPGSV,4,1,15,14,62,296,28,01,60,029,13,22,54,084,,03,53,135,*7F $GPGSV,4,2,15,28,45,312,30,21,39,046,20,17,38,307,31,08,22,095,*75 $GPGSV,4,3,15,30,19,235,,19,14,293,21,07,05,201,,06,03,240,*71 .....(以下, 略).....
プログラム例と実行 (2)
上記の mrblib/loops/master.rb の 7 行目を修正し,RMC のセンテンスのみ表示する. GPS に送信するコマンド (UART.write の引数) の詳細は, GPS のデータシート を参照すること.
1 # coding: utf-8
2
3 # GPS初期化 txPin = 17, rxPin = 16 のため uart_num = 2 とする
4 gps = UART.new(2, 9600)
5
6 # 出力を RMS のみに
7 gps.write("$PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*29\r\n")
8
9 # 入力データをclear_tx_bufferで消去する
10 puts "> gps.clear_tx_buffer"
11 gps.clear_tx_buffer
12
13 # 入力データが来るのを待つ
14 sleep 2
15
16 # nonblock で到着している分のデータを取得する (デフォルトでは出力もされる)
17 lines = gps.read_nonblock(4096)
18
19 # 以下、到着したデータを 1 行ずつ読み込んで表示
20 while true
21 puts gps.gets()
22 sleep 1
23 end
コンパイルと実行. RMS のセンテンスのみ出力されるようになったことが確認できる. タイミングの問題で欠損が生じる (取り出したデータサイズがゼロ) の場合も見られる.
$ make flash monitor
...(前略)......
start UART (mruby/c class)
start AQM0802A (mruby/c class)
start RC8035SA (mruby/c class)
UART: driver was successfully installed
> gps.clear_tx_buffer
???b*?1,6,3.71,48.0,M,28.6,M,,*6B
$GPGLL,3529.8205,N,13301.5026,E,033250.000,A,A*5D
$GPGSA,A,3,28,01,14,17,21,19,,,,,,,3.83,3.71,0.94*01
$GPGSV,4,1,15,14,64,290,24,01,57,032,18,03,56,129,,22,53,078,13*78
$GPGSV,4,2,15,28,48,309,31,17,40,310,25,21,37,048,19,08,20,098,*7A
$GPGSV,4,3,15,19,17,295,30,30,16,232,,06,05,242,,07,03,199,*7C
$GPGSV,4,4,15,193,,,,194,,,,195,,,*47
$GPRMC,033250.000,A,3529.8205,N,13301.5026,E,0.92,196.34,190621,,,A*65
$GPVTG,196.34,T,,M,0.92,N,1.71,K,A*38
$GPZDA,033250.000,19,06,2021,,*5E
$PMTK001,314,3*36
$GPRMC,033251.000,A,3529.8199,N,13301.5026,E,1.17,198.50,190621,,,A*62
欠損
$GPRMC,033252.000,A,3529.8198,N,13301.5029,E,0.60,189.15,190621,,,A*6F
$GPRMC,033253.000,A,3529.8198,N,13301.5027,E,0.59,189.15,190621,,,A*6A
$GPRMC,033254.000,A,3529.8201,N,13301.5026,E,0.13,189.15,190621,,,A*61
$GPRMC,033255.000,A,3529.8202,N,13301.5023,E,0.38,189.15,190621,,,A*6F
$GPRMC,033256.000,A,3529.8204,N,13301.5021,E,0.11,189.15,190621,,,A*63
$GPRMC,033257.000,A,3529.8204,N,13301.5021,E,0.30,189.15,190621,,,A*61
$GPRMC,033258.000,A,3529.8204,N,13301.5020,E,0.35,189.15,190621,,,A*6A
$GPRMC,033259.000,A,3529.8204,N,13301.5019,E,0.51,189.15,190621,,,A*63
$GPRMC,033300.000,A,3529.8204,N,13301.5017,E,0.65,222.88,190621,,,A*61
.....(以下, 略).....
プログラム例と実行 (3)
上記の mrblib/loops/master.rb の 22 行目を修正し,10 秒間隔で UART.get してみる.
1 # coding: utf-8
2
3 # GPS初期化 txPin = 17, rxPin = 16 のため uart_num = 2 とする
4 gps = UART.new(2, 9600)
5
6 # 出力を RMS のみに
7 gps.write("$PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*29\r\n")
8
9 # 入力データをclear_tx_bufferで消去する
10 puts "> gps.clear_tx_buffer"
11 gps.clear_tx_buffer
12
13 # 入力データが来るのを待つ
14 sleep 2
15
16 # nonblock で到着している分のデータを取得する (デフォルトでは出力もされる)
17 lines = gps.read_nonblock(4096)
18
19 # 以下、到着したデータを 1 行ずつ読み込んで表示
20 while true
21 puts gps.gets()
22 sleep 10
23 end
コンパイルと実行. 10 秒間隔で出力するようプログラミングしたつもりだが, 第 2 引数の時刻部分を見ると 033932, 033933, 033934, 033935, 033936, ... というように 1 秒間隔で表示される. これは GPS から受け取ったセンテンスはバッファに溜まっており,UART.get はバッファの最初の 1 行を読み出しているためである.
$ make flash monitor ...(前略)...... UART: driver was successfully installed > gps.clear_tx_buffer $PMTK001,314,3*36 $GPRMC,033932.000,A,3529.8222,N,13301.5116,E,0.14,162.49,190621,,,A*62 $GPRMC,033933.000,A,3529.8221,N,13301.5116,E,0.32,162.49,190621,,,A*64 $GPRMC,033934.000,A,3529.8220,N,13301.5117,E,0.62,165.37,190621,,,A*68 $GPRMC,033935.000,A,3529.8210,N,13301.5114,E,0.63,166.90,190621,,,A*66 $GPRMC,033936.000,A,3529.8201,N,13301.5112,E,0.83,188.62,190621,,,A*60 .....(以下, 略).....
プログラム例と実行 (4)
mrblib/loops/master.rb を編集し,バッファに溜まったセンテンスの最後の行を取り出して 表示する. 具体的には,18 行目で UART.read_nonblock でバッファに入っているデータを全部取り出し, $ 区切りで配列化し,配列の最後の要素だけを pop メソッドで取り出すようにしている.
1 # coding: utf-8
2
3 # GPS初期化 txPin = 17, rxPin = 16 のため uart_num = 2 とする
4 gps = UART.new(2, 9600)
5
6 # 出力を RMC に限定する.
7 #gps.write("$PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*29\r\n")
8
9 while true
10
11 # バッファをクリア
12 gps.clear_tx_buffer
13
14 # 2 秒間バッファに溜める
15 sleep 2
16
17 # データ取得・表示
18 line = gps.read_nonblock(4096).split('$').pop
19 puts "*** #{line} ***"
20
21 # 待ち
22 sleep 8
23 end
コンパイルと実行. UART.read_nonblock を用いると読み込んだデータが標準出力に表示され, さらに 19 行目の puts コマンドの出力が表示される. 今度は先の例と異なり,10 秒間隔でデータが出力されていることが確認できる. なお, 先の例で示したように,GPS は 1 秒単位でデータを出力するが, タイミングの問題でマイコン側でデータの欠損が生じることがある. そのため,上記プログラムでは GPS からのデータの受け取りに 2 秒間費やしている.
$ make flash monitor ...(前略)...... start RC8035SA (mruby/c class) UART: driver was successfully installed $GPRMC,040618.000,A,3529.8208,N,13301.5070,E,0.70,217.33,190621,,,A*66 $GPRMC,040619.000,A,3529.8205,N,13301.5070,E,0.62,217.33,190621,,,A*69 ***GPRMC,040619.000,A,3529.8205,N,13301.5070,E,0.62,217.33,190621,,,A*69 $GPRMC,040628.000,A,3529.8207,N,13301.5068,E,0.38,217.33,190621,,,A*6F $GPRMC,040629.000,A,3529.8206,N,13301.5069,E,0.44,217.33,190621,,,A*65 ***GPRMC,040629.000,A,3529.8206,N,13301.5069,E,0.44,217.33,190621,,,A*65 0638.000,A,3529.8192,N,13301.5068,E,0.07,186.15,190621,,,A*62 データ欠損 $GPRMC,040639.000,A,3529.8192,N,13301.5068,E,0.28,186.15,190621,,,A*6E ***GPRMC,040639.000,A,3529.8192,N,13301.5068,E,0.28,186.15,190621,,,A*6E ,3529.8191,N,13301.5072,E,0.17,186.20,190621,,,A*6A データ欠損 $GPRMC,040649.000,A,3529.8191,N,13301.5073,E,0.52,186.20,190621,,,A*6B ***GPRMC,040649.000,A,3529.8191,N,13301.5073,E,0.52,186.20,190621,,,A*6B 090,E,0.27,66.62,190621,,,A*52 データ欠損 $GPRMC,040659.000,A,3529.8205,N,13301.5091,E,0.11,66.62,190621,,,A*56 ***GPRMC,040659.000,A,3529.8205,N,13301.5091,E,0.11,66.62,190621,,,A*56 190621,,,A*62 データ欠損 $GPRMC,040709.000,A,3529.8206,N,13301.5109,E,0.39,107.08,190621,,,A*61 ***GPRMC,040709.000,A,3529.8206,N,13301.5109,E,0.39,107.08,190621,,,A*61 .....(以下, 略).....
プログラム例と実行 (4)
mrblib/loops/master.rb を編集し,日時と緯度経度を LCD への出力できるようにする.
1 # coding: utf-8
2
3 #I2C 初期化
4 i2c = I2C.new(22, 21)
5
6 # LCD 初期化
7 lcd = AQM0802A.new(i2c)
8 lcd.setup
9
10 # GPS初期化 txPin = 17, rxPin = 16 のため uart_num = 2 とする
11 gps = UART.new(2, 9600)
12
13
14 # 出力の調整
15 #gps.write("$PMTK314,0,1,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*28\r\n") # RMC と GGA
16 gps.write("$PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*29\r\n") # RMC のみ
17 #gps.write("$PMTK314,-1*04\r\n") # デフォルト
18
19
20 while true
21
22 sleep 3
23
24 # バッファをクリア
25 gps.clear_tx_buffer
26
27 # 2 秒間バッファに溜める
28 sleep 2
29
30 # データ取得・表示
31 lines = gps.read_nonblock(4096).split('$').pop
32 data = lines.split(',') #カンマ区切りで配列化
33
34 if data[2] == "A" && data.size == 13 #ステータスが "A" であること,データ数が揃っていることを確認.
35 # data[9] : 日付, data[1] : 時刻
36 time1 = "#{data[9][4]}#{data[9][5]}-#{data[9][2]}#{data[9][3]}-#{data[9][0]}#{data[9][1]}"
37 time2 = "#{data[1][0]}#{data[1][1]}:#{data[1][2]}#{data[1][3]}:#{data[1][4]}#{data[1][5]}"
38 lat = "#{data[3].to_f / 100.0}#{data[4]}"
39 lng = "#{data[5].to_f / 100.0}#{data[6]}"
40
41 puts "time (UTC): #{time1}T#{time2}"
42 puts "Latitude: #{lat}"
43 puts "Longitude: #{lng}"
44
45 lcd.clear
46 lcd.cursor(0, 0)
47 lcd.write_string(time1)
48 lcd.cursor(0, 1)
49 lcd.write_string(time2)
50 sleep 5
51 lcd.cursor(0, 0)
52 lcd.write_string(lat)
53 lcd.cursor(0, 1)
54 lcd.write_string(lng)
55
56 else
57 lcd.clear
58 lcd.cursor(0, 0)
59 lcd.write_string("Please")
60 lcd.cursor(1, 1)
61 lcd.write_string("Wait...")
62 end
63
64 end
コンパイルと実行. 10 秒ごとに標準出力に日時と緯度経度が表示され, さらに LCD にも同じものが表示されることが確認できる.
$ make flash monitor ...(前略)...... start I2C (mruby/c class) start UART (mruby/c class) start AQM0802A (mruby/c class) UART: driver was successfully installed $GPRMC,042027.000,A,3529.8215,N,13301.5004,E,0.45,36.80,190621,,,A*5E $GPRMC,042028.000,A,3529.8215,N,13301.5003,E,0.29,36.80,190621,,,A*5C time (UTC): 21-06-19T04:20:28 Latitude: 35.2982N Longitude: 133.015E $GPRMC,042037.000,A,3529.8223,N,13301.4984,E,0.77,357.23,190621,,,A*66 $GPRMC,042038.000,A,3529.8227,N,13301.4974,E,0.76,1.14,190621,,,A*67 time (UTC): 21-06-19T04:20:38 Latitude: 35.2982N Longitude: 133.015E A*6D 0.79,342.58,190621,,,A*62 データ欠損 $GPRMC,042049.000,A,3529.8255,N,13301.4943,E,0.83,347.63,190621,,,A*6B time (UTC): 21-06-19T04:20:49 Latitude: 35.2983N Longitude: 133.015E $GPRMC,042058.000,A,3529.8255,N,13301.4940,E,0.62,294.92,190621,,,A*66 $GPRMC,042059.000,A,3529.8249,N,13301.4935,E,0.59,294.92,190621,,,A*60 time (UTC): 21-06-19T04:20:59 Latitude: 35.2982N Longitude: 133.015E .....(以下, 略).....